Objectifs de l’enseignement :
Introduire les propriétés et les représentations des systèmes dynamiques linéaires à temps discret. Donner les éléments fondamentaux de la commande des systèmes linéaires représentés sous forme de fonction de transfert en Z. Présenter les différentes méthodes de synthèse de correcteurs à temps discrets.
- Enseignant: asma laouamri
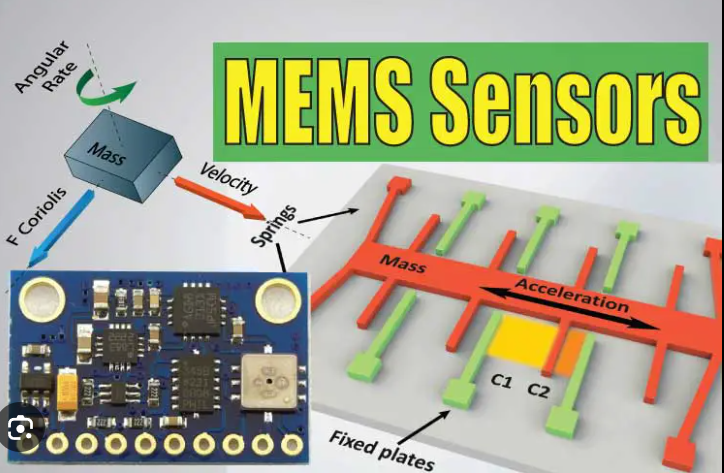
Introduire les capteurs intelligents et les MEMS, leurs techniques de fabrication et leurs domaines
d’application. Connaître les avantages des capteurs intelligents et MEMS actuels. Configurer,
diagnostiquer et utiliser les outils de communication pour dialoguer avec ces nouveaux capteurs.
- Enseignant: ibtissem adoui
Amener l’étudiant à se familiariser avec la robotique en premier lieu. A la fin de ce cours, l’étudiant sera en mesure de proposer une solution s’agissant de robotiser une tâche industrielle.
- Enseignant: abdeslem sahli
Dans cette matière, les étudiants auront à étudier les différents types de circuits programmables, ainsi que les différentes méthodes de conception en particulier la programmation en utilisant les langages de description matérielle.
- Enseignant: khaoula belguidoum
- Enseignant: soumia sidahmed
Apparu au début des années 90, le langage C++ est actuellement l’un des plus utilisés dans le monde, aussi bien pour les applications scientifiques que pour le développement des logiciels. En tant qu’héritier du langage C, le C++ est d’une grande efficacité. Mais il a en plus des fonctionnalités puissantes, comme par exemple la notion de classe, qui permet d’appliquer les techniques de la programmation-objet.
- Enseignant: yehya belhadad
Introduction aux bus locaux industriels et bus de terrain.
Notions de transmission de données numériques, et différents types de réseaux industriel existants.
Etudes des différentes topologies, avantages et inconvénients vis-à-vis d'une installation industrielle donnée.
- Enseignant: sarra bendib
- Enseignant: yehya belhadad
Mettre en pratique les connaissances théoriques apprises dans les cours de Robotique industrielle
- Enseignant: abdeslem sahli
Les exercices aident les étudiants à appliquer les notions de base du cours.
- Enseignant: asma laouamri